|
До начала проведения процедуры калибровки гиросенсоров и
сразу после включения коптера потребуется произвести
калибровку компаса - хотя бы некачественную, в имеющихся
условиях, можно вблизи металлических предметов.
1. Калибровка R и P (гиросенсора).
Ставим квадрик на строго горизонтальную поверхность.
Левый стик до упора вправо, правый
раскачиваем влево-вправо пока все четыре колпака не
загорятся жёлтым. После этого R и P сбрасывается в ноль.
Проверяем, поворачивая квадрик на 90 градусов "след в след".
В каждом из четырёх положений показания R и P должны быть по
нулям. Нет - перекалибровываем на
более горизонтальной поверхности.
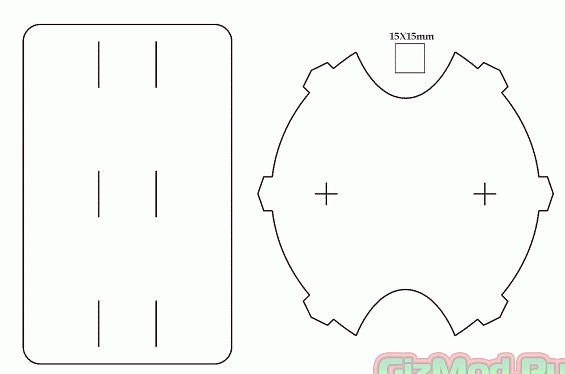
2. Калибровка акселерометра.

Эта калибровка в основном нацелена точность позиционирования
поворотов по yaw.
Т.е. если дрон летит боком или унитазит, то следует
тщательно сделать эту калибровку. Можно делать на офисном
вращающемся стуле. Устанавливаем дрон геометрическим центром
в центр вращения стула.
Левый стик до упора вверх, правый раскачиваем
вверх-вниз пока не загорятся жёлтым колпаки. Далее
ждём, пока не начнут бегать по кругу красные огни.
Плавно вращаем дрон на столе пока все колпаки не станут
зелёными. После этого останавливаем вращение и пока колпаки
горят жёлтым не трогаем.
Если процедура проходит успешно, то повториться она должна
два раза.
Если красные огни включаются в третий раз или далее, то
нужно более точно отцентрировать дрон и более плавно
вращать.
3. Калибровка компаса.
Альтернативный вход в режим калибровки компаса (может
использоваться помимо режима калибровки после каждого
подключения питания).
Удерживая левый стик в левом положении,
несколько раза быстро перемещать правый стик из
крайнего левого положения в крайнее правое положение и
обратно.

Компас служит для исключения накапливающейся ошибки при
определении поворота по
акселерометру. Т.е. он работает совместно с акселерометром и
для исключения унитазов, полётов боком и т.д. Калибровать их
нужно оба.
Рекомендуется при калибровке убрать из карманов все
магнитные предметы такие как связки ключей, мобильные
телефоны (они все с динамиками), сумки с магнитными
защёлками и т.п.
Левый стик отводим до упора влево, а правый
раскачиваем влево-вправо. После того, как красные
огни начинают бегать по кругу, ждем пока показания H
на пульте перестанут меняться. После этого плавно вращаем
дрон вокруг вертикальной оси до тех пор пока не начнут огни
попеременно мигать зелёным. После этого поворачивам дрон
носом вниз и делаем небольшую паузу для устаканивания
показаний. Потом вращаем дрон вокруг оси нос-хвост до тех
пор пока не перестанут перемаргиваться зелёные огни.
Далее проверяем калибровку по заведомо достоверному компасу,
например по компасу для спортивного ориентирования или
компасу в мобильном телефоне, если вы ему доверяете.
Выставляем дрона так, чтобы показания H были равны
нулю и проверяем, чтобы дрон смотрел головой точно на север.
Далее поворачиваем дрон "след в след" на 90 градусов и
проверяем, чтобы показания были 90 градусов, затем 180, 270
и опять ноль. Допускаются небольшие отклонения, особенно на
больших углах, но они не должны быть более 5-7 градусов.
Если в каком-то из положений показания отличаются от
референсного компаса более, чем на 10 градусов, то
калибровку следует повторить.
4. Калибровка стиков пульта.
Поместить оба стика в левый верхний угол и удерживая
их в таком положении включить питание пульта.
Сделать два полных оборота стиками по кругу, держа стики в
максимально крайнем положении по периметру. После этого
нажать на кнопку любого триммера.
Спецрежимы
Вход в режим привязки коптера (Bind)
Удерживая левую кнопку ФОТО (Enter-Pro) включить
питание пульта.

После чего подключить батарею к
коптеру и поднести его как можно ближе к пульту до звукового
сигнала пульта и появления изображения на дисплее.
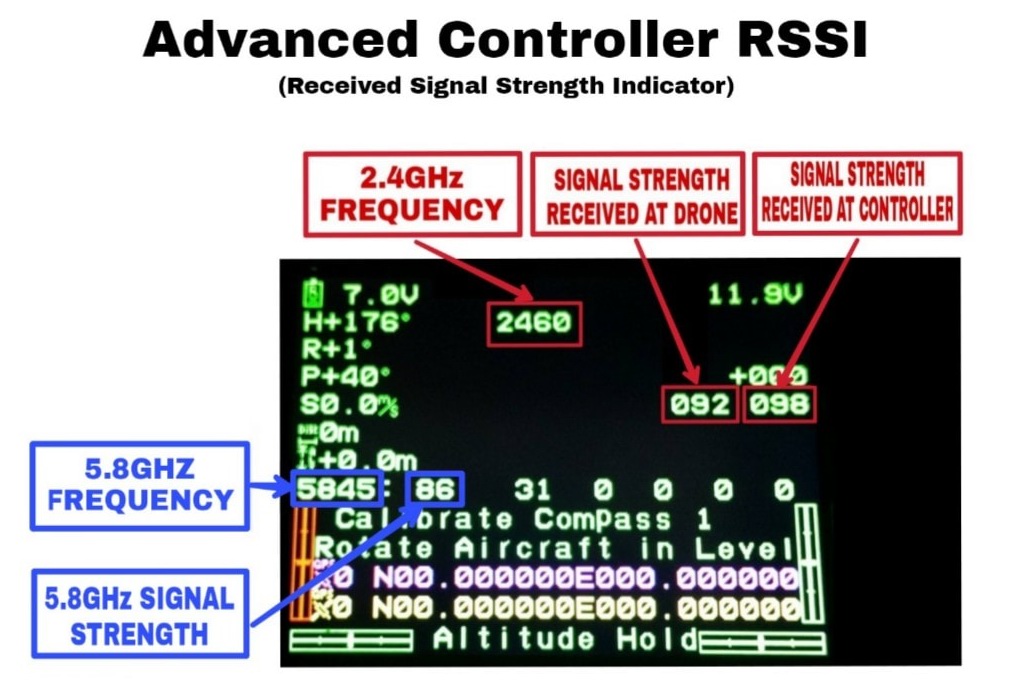
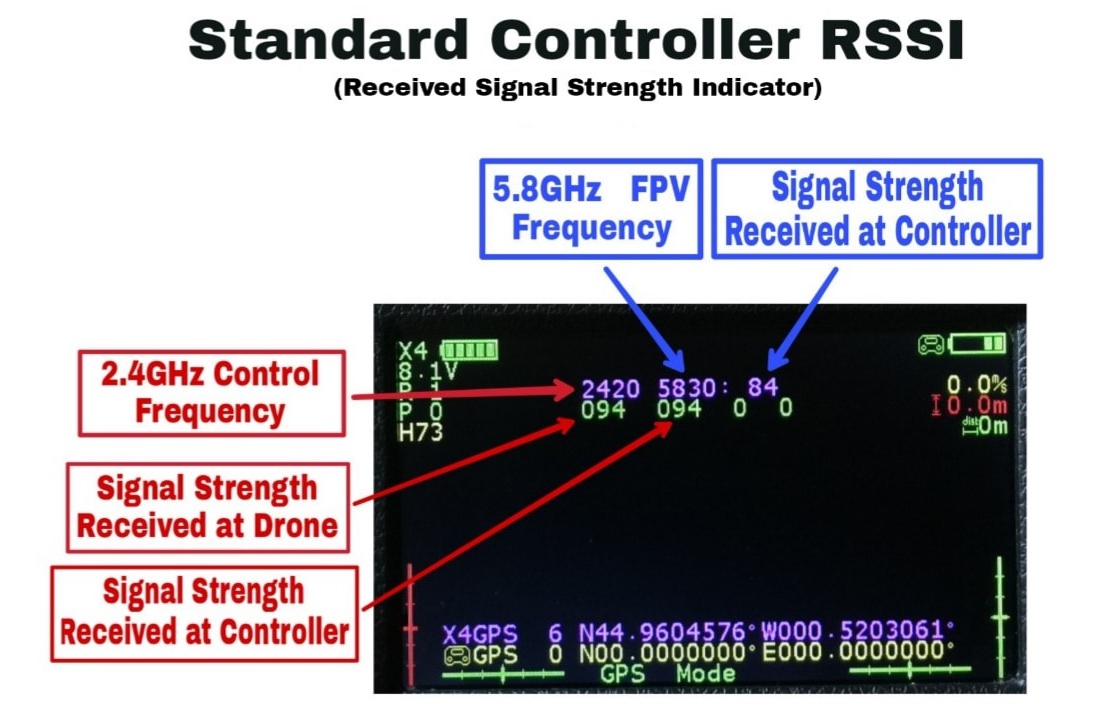
Вход в режим
вывода дополнительной информации (RSSI)
Удерживая кнопку ВИДЕО (Exit-Pro)
включить питание пульта.
На дисплей будет выводиться информация о рабочих частотах,
уровне принимаемого сигнала и др.
1-я цифра OSD 2.4 (телеметрия)
2-я цифра RSSI 2.4 (управление)
3-я цифра выше ступеней зон удаления 0, 0
- RSSI 5.8 (видеолинк)
Включить
отображение напряжения батареи пульта в вольтах
Удерживая нажатым левый
стик включить питание пульта.
Вход в меню
Левый стик вниз до упора, нажать правый стик.
Переключение режима огней
Нажать и удерживать нижний триммер
газа до смены режима.
Общий сброс
пульта
Нажать по центру левый и правый стики. Удерживая в
нажатом положении оба стика включить питание пульта.

При сбросе выводится цифровая информация о напряжении
батареи пульта и др. сведения.
Режим "Circle fly" (Полет по
кругу)
1.5 сек нажатие кнопки
«Видео», и на панели появятся слова "Crcle
fly".
Управление скоростью круга, перемещая правый стик
влево или вправо.
Управление высотой круга -
левая ручка «газа».
"Сircle fly" может работать, когда есть не менее 6-ти
спутников.
1.5 сек нажатия кнопки «Фото» -
позволяет выбрать любой "центр орбиты". (В поздних
прошивках).
Для информации
1. Любой
предмет является препятствием для канала управления, а для
видеоканала всё ещё хуже.
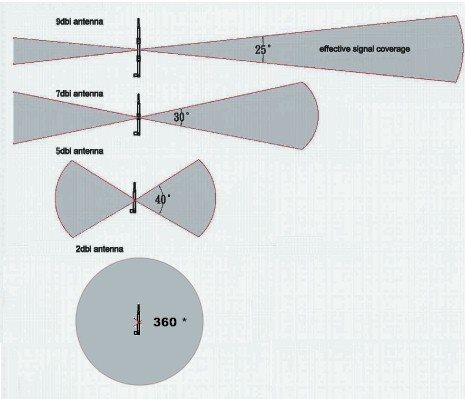
2. Максимальная дальность управления возможна только при
прямой видимости между антенной коптера и антенной пульта.
Листья деревьев являются непреодолимым препятствием для
видеоканала и значительным препятствием для управления.
Инструкция перед стартом
1.
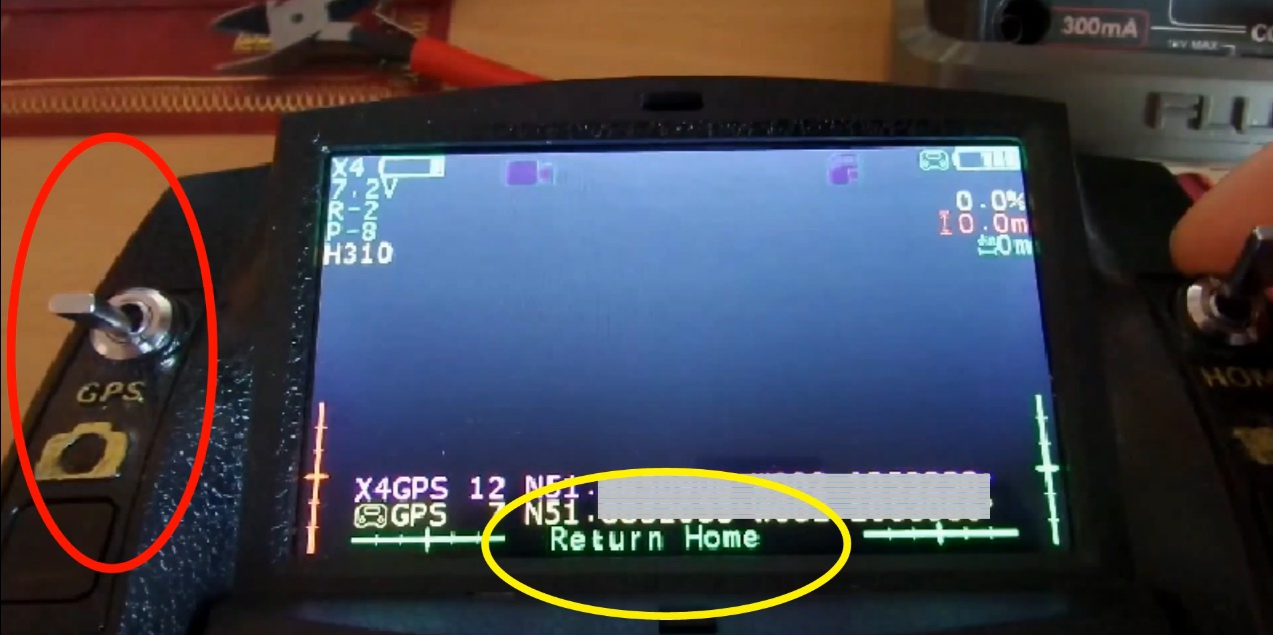
Выключаем тубмлер GPS, если был включен.
2. Включаем пульт. Ждем появления не менее 6 спутников.
3. Ставим квадр на ровную площадку для взлета и подключаем
аккумулятор. Музыка, надпись Гиро чек. Отходим на 5-10
метров.
4. После появления надписи "Calibrate Compass 1" выжидаем и
смотрим, чтобы стабилизировались крены (P и R) были нулевые
(или +-1), а также появились показания компаса H порядка 20
сек.), определение спутников квадрокоптера не ждем.
5. На вытянутых руках в горизонтальной плоскости, по часовой
стрелке медленно вращаем квадрокоптер, до появления надписи
"Calibrate Compass 2" и моргания светодиодов зеленым светом.
6. Все так же на вытянутых руках опускаем нос квадрокоптера
вниз, дожидаемся примерной стабилизации показаний на пульте,
затем крутим квадрокоптер по часовой стрелке в вертикальной
плоскости до готовности.
7. Проверяем углы и ждем определения не менее 6
спутников квадрокоптером, включаем GPS, старт, смотрим как
держит "точку", проверка "следуй за мной" и только после -
проверка "возврата домой".
8. Если "ждали спутники", то калибровка компаса пропущена.
Следует вызвать принудительно - левый стик влево и правый в
стороны. И калибровать (или переподключить батарейку).
P.S.
После калибровки компаса надо проверить показания компаса на
все 4 стороны, если хоть на одну сторону они не верны то
калибровку повторить с начала. Если этого не сделать, то
впоследствии значения уплывут (не все 4, а от 1 до 3 сторон
света, одна сторона при любых обстоятельствах будет
показывать верно).
Унитазы
Правило:
Компас калибровать при выключенном GPS на пульте.
Причины:
1. Некорректная калибровка компаса (отсюда неадекватность и
унитаз). В таких случаях нужно включать АМ (выключение GPS)
и полный газ, чтобы вывести его на безопасную высоту и дать
время успокоиться. Возврат домой (RTH) лишь усугубит
ситуацию, т.к. в этом режиме даже при корректной калибровке
квадрик слушается только левого стика (газ и руддер).
2. После перепрошивки Вы не провели все калибровки (по
мануалу).
Попробуйте взлететь и повисеть в АМ (желательно в
безветренную погоду). В этом режиме электроника минимально
вмешивается в управление (только горизонтальная стабилизация
и удержание высоты).
Если более менее висит в одной точке, значит всё же
калибровка компаса.
Если же постоянно дрейфует (сносит) в одну сторону -
калибровки гироскопа/акселерометра.
Полетайте (в этом же режиме), только осторожно - скорость
будет выше и присутствует инерционность (при отпускании
правого стика квадрик ещё какое-то время будет продолжать
лететь в том же направлении) и понаблюдайте за его
поведением.
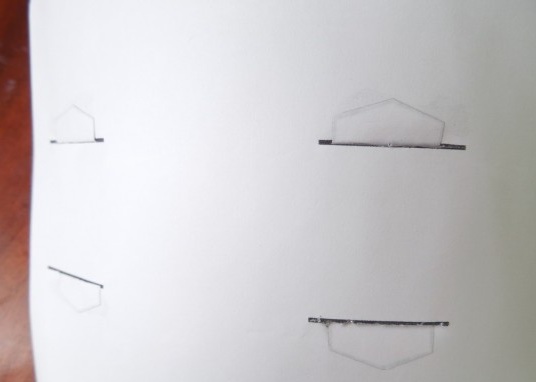
Если ситуация "унитаз" воспроизводится везде, тогда советую
провести последовательно все процедуры калибровки точно по
инструкциям (стики, акселерометр "на бумажках",
магнитометр).
Еще, каждый раз после взлета, выполняйте проверку
корректности работы режима "следуй за мной": отлетаем на
15-20м , высота 10, включаем Follow me ... дрон должен
повернутся на Вас... и Вы в центре (или почти) кадра...точку
держит...значит можно лететь...
Потери связи. Режим ММ
Когда квадр вдруг внезапно набирает высоту и решает смыться
на родину, разработчики создали данную функцию - при
удержании в нижнем положении стика газа в течении 3-4сек
квадр переходит в ММ для возврата контроля управления.
Но иногда эта функция не правильно распознаётся переводя
квадр в ММ когда мы этого не ждём.
Пример такой ситуации.
Мы летаем и вроде бы всё ок! Но существуют термики и как
только Х4 попадает в него, его начинает тянуть в верх. Мы
интуитивно стик газа в низ, а он всё равно взлетает, тут то
и происходит переключение в ММ. По бародатчику он видит
набор высоты при этом газ в нуле, вот он и переключается на
ММ, чтобы дать нам возможность посадить его в ручном режиме.
Есть и другие варианты этого глюка. Например при быстром
полёте и резком торможении, давление над спиной квадра резко
понижается, он думает что идёт набор высоты, показания
высоты поднимаются на экране. Мы опять стик вниз пытаясь
скинуть высоту. На это уходит 3-4сек и тут квадр переходит в
ММ. Происходят кувырки, так как мы продолжаем судорожно
дёргать стики, не подозревая что квадр находится в ММ.
Поэтому не рекомендуют превышать 14-16м/с и производить
резкое торможение.
В ММ Переходит когда вы жмете газ вниз, а квадрик наоборот
набирает высоту (по датчику барометра). Это происходит в
трех случаях:
1. Когда есть воздушный восходящий поток.
2. Когда потеряно управление над квадриком в результате
глюка.
3. При резком торможении и маневрах.
Этого не происходит если вы успешно спускаетесь вниз.
Х4 переходит в ММ в случае постоянного набора высоты по
бародатчику при удержании стика газа в крайнем нижнем
положении в течении 3-4сек!
Простая рекомендация при выключении и включении пульта в
полете: при включении пульта не забудьте снова нажать на
кнопку записи видео. Если до выключения пульта запись была
активна и она по-прежнему требуется.
|